<< wersja PL>> OPIS
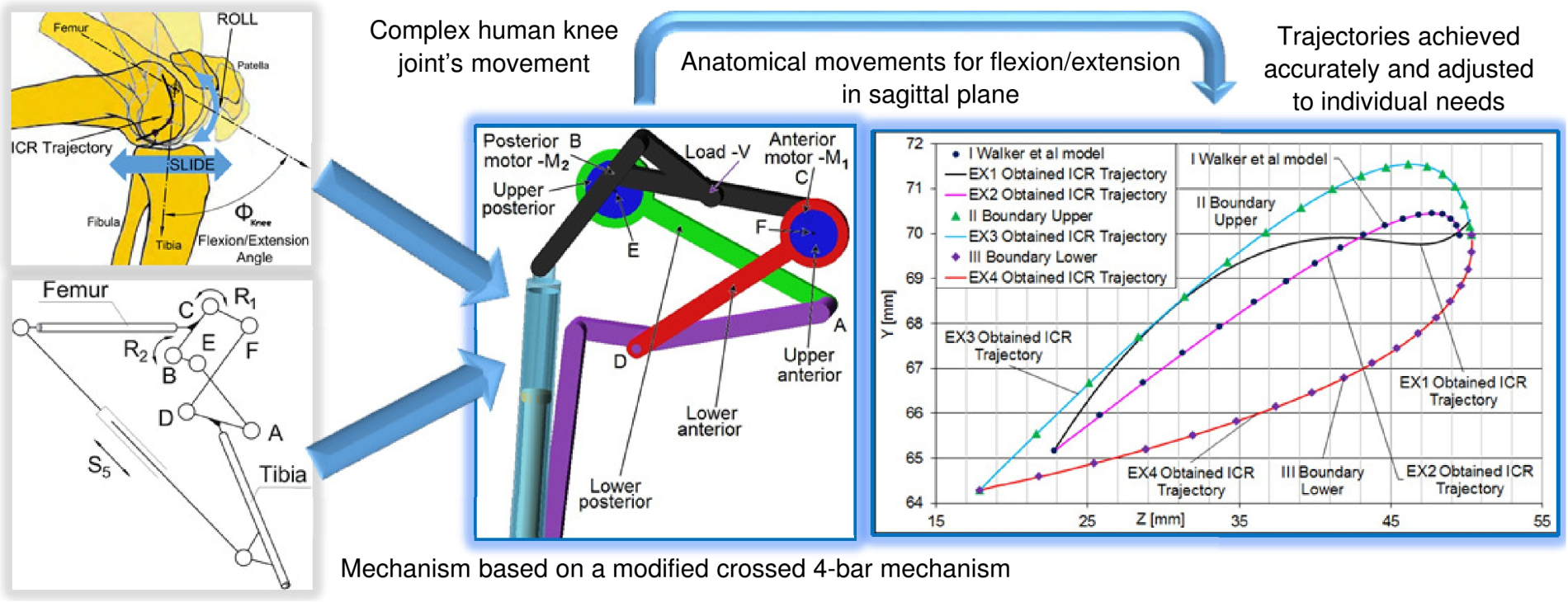
The paper focuses on the development of a new adjustable knee joint mechanism that can also be used as a device to assist in the rehabilitation of knee joint motion. The mechanism is synthesised and based on a crossed 4-bar linkage in order to reproduce the complex knee joint motion in terms of the flexion/extension movement in the sagittal plane with variable instantaneous centre of rotation (ICR) positions. The mechanism is modified by introducing two additional degrees of freedom, each one in the form of 2-link modules that are moved by rotational motors. Thus, a final new design of the knee joint mechanism is developed and a 3D dynamic model is formulated in ADAMS. Simulations are then conducted on the model in order to characterise the functioning of an optimal solution that considers the degree of compatibility between the trajectories of the ICR of a human reference knee joint and the ICR of the new mechanism. Numerical results are presented with regards to the mechanism’s main advantage, i.e. the possibility of achieving several trajectories. This enables the knee joint trajectory to be corrected step by step in real-time and to be adjusted to individual needs.
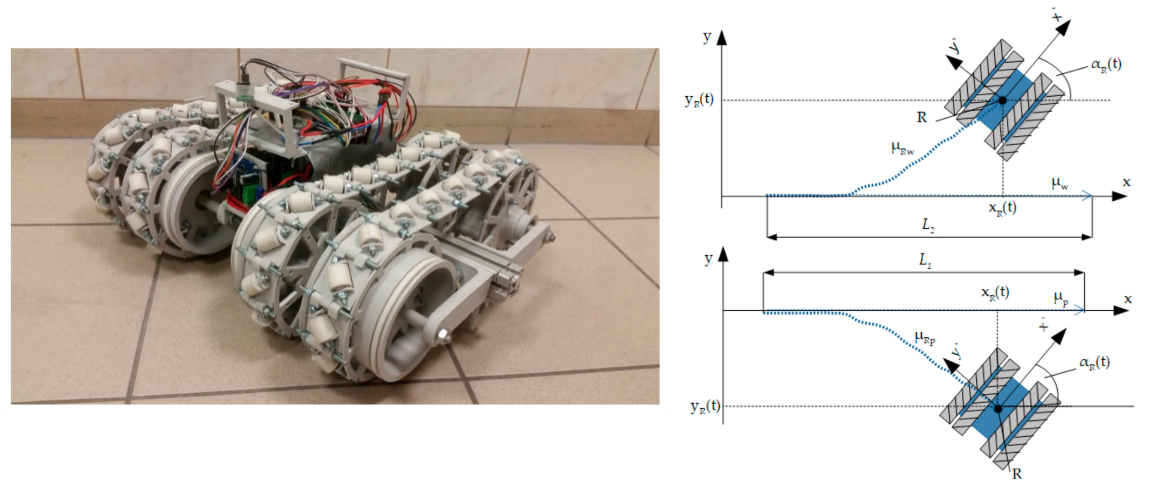
This article deals with the design and testing of mobile robots equipped with drive systems based on omnidirectional tracks. These are new mobile systems that combine the advantages of a typical track drive with the advantages of systems equipped with omnidirectional Mecanum wheels. The omnidirectional tracks allow the robot to move in any direction without having to change the orientation of its body. The mobile robot market (automated construction machinery, mobile handle robots, mobile platforms, etc.) constantly calls for improvements in the manoeuvrability of vehicles. Omnidirectional drive technology can meet such requirements. The main aim of the work is to create a mobile robot that is capable of omnidirectional movement over different terrains, and also to conduct an experimental study of the robot’s operation. The paper presents the construction and principles of operation of a small robot equipped with omnidirectional tracks. The robot’s construction and control system, and also a prototype made with FDM technology, are described. The trajectory parameters of the robot’s operation along the main and transverse axes were measured on a test stand equipped with a vision-based measurement system. The results of the experimental research became the basis for the development and experimental verification of a static method of correcting deviations in movement trajectory.
Działalność naukowa i dydaktyczna pracowników Zespołu koncentruje się wokół ogólnie pojmowanych teoretycznych i aplikacyjnych aspektów mechaniki układów kinematycznych, w szczególności teorii maszyn i mechanizmów, automatyki i robotyki oraz mechatroniki. Prace prowadzone są między innymi w Laboratorium Mechatroniki i Robotyki i dotyczą analizy (również badania symulacyjne) i projektowania (wirtualnego prototypowania) praktycznie dowolnych układów mechanicznych (zespołów maszynowych), płaskich i przestrzennych układów kinematycznych takich jak maszyna robocza, manipulator, pojazdy, układ napędowy.
Kolejnym ważnym polem działalności Zespołu są układy mechatroniczne, których ważkim elementem jest możliwość zastosowania nawet skomplikowanych algorytmów sterowania zapewniających niezawodność, pełną kontrolę parametrów i szerokie możliwości diagnostyki w przypadku awarii.
Działalność naukowo-badawcza Zespołu związana z projektowaniem nowych, modernizacją lub analizą już istniejących maszyn i urządzeń obejmuje takie zagadnienia jak:
- synteza strukturalna, tj. dobór racjonalnej koncepcji mechanizmu - układu kinematycznego do realizacji określonego zadania technicznego, jak np.: przemieszczanie elementów w ruchu obrotowym, postępowym, płaskim czy przestrzennym,
- synteza geometryczna mechanizmów płaskich i przestrzennych realizujących określone zadania, jak: transformacja ruchu według wymaganych charakterystyk, przemieszczanie elementów przez pożądane położenia, prowadzenie punktów po określonych trajektoriach itp.
- projektowanie mechatroniczne - uwzględniające projekt mechaniczny, modelowanie i projekt układu sterowania - układów kinematycznych o wielu stopniach swobody (wielonapędowych), takich jak: urządzenia automatyczne, specjalizowane manipulatory i roboty o strukturze szeregowej i równoległej, roboty mobilne, itp.,
- komputerowe badania symulacyjne pracy maszyn i urządzeń, w szczególności pojazdów, manipulatorów, maszyn roboczych, mechanizmów maszyn obróbczych, z uwzględnieniem napędów i układów sterowania pod kątem poprawy ich własności kinematycznych i dynamicznych, wrażliwości na odchyłki wykonawcze (racjonalizacja struktury), sprawności, itd.,
- projektowanie mechatronicznych układów do wspomagania rehabilitacji kończyn człowieka.
Przykłady: manipulatory równoległy, roboty mobilne, roboty kołowo-kroczące, układy mechatroniczne, maszyny robocze, układy rehabilitacyjne kończyn człowieka, układy napędowe pojazdów